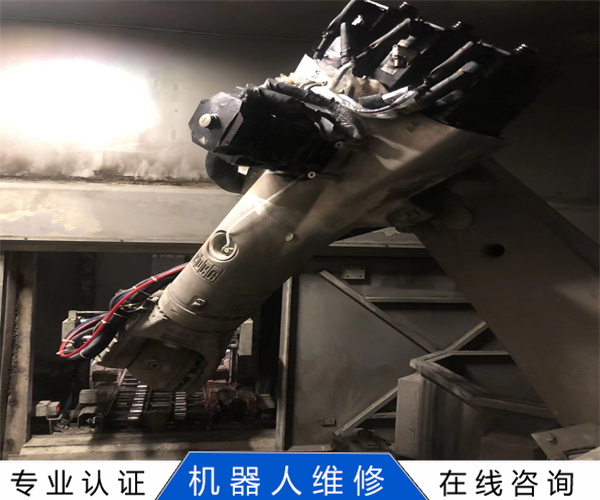
发那科FANUC机器人短路故障维修 机械臂维修
便于集成在紧凑型包装机械中。根据包装应用进行过优化,是机器人自动化的必然选择。配有全套辅助设备(从集成式空气与信号系统至抓料器),可配套使用ABB包装软PickMasterTM,机械方面集成简单,编程更是十分方便。ABB装配机器人维修的型号如下:ABBIRB260装配机器人ABB装配机器人IRB1600ABB装配机器人IRB1410维修ABB装配机器人IRB120ABB装配机器人IRB360维修ABB机器人IRB1200ABB工业机器人IRB140装配机器人ABB装配机器人IRB1600维修保养。 我们也可以现场提供维修服务,服务内容产品维修:根据用户需求,对返修的产品进行标准维修和快速维修,PCB电路板维修:对产品中的PCB电路板进行的功能检测和芯片级维修,设备故障调查:根据设备损坏程度和故障情况。
要保持正常运行时间并延长机器人的整体的使用期限,您应当考虑到的是不仅仅需要维修,还相应进行维保工作,幸运的是,不仅仅像我们的竞争对手那样简单地直接更换故障部分,而我们会从头到尾对您的机器人进行检测再维修。
提示我们进行机器人的检修,我们应该怎么做呢,答:报警提示10106/10107/10108/10109/10110/10111/10112的含义是与机器人定期保养和检修有关的,用于提示用户对机器人进行必要的保养和检修。
更多机器人维修、机器人保养知识可以关注我们,会定时更新哦。Tags:维修保养工业机器人的公司洁净机器人川崎Kawasaki电机P80B22450LCX2.2KW全新二手大量现货供应|注:由于品种更新较快,部分备件没有及时上传,产品,我们会根据客户需求推荐服务方案,产品及技术咨询请拨打我们竭诚为您服务。
发那科FANUC机器人短路故障维修 机械臂维修
机器人焊接维修常见故障一般分为两类
(一)就是针对焊接外部设备的,比如控线通断开路断路等,这种常见故障很容易解决。
(二)另外一种是内部常见设备毁坏就是IG模块毁坏,通常是超温造成的风叶不转、控制电路主机电源毁坏等,本公司有丰富工业机器人焊接维修经验,我们准没错。

没有发生改变,原因:造成此现象产生的原因很多,下面逐个说明:表面声波触摸屏四周边上的声波反射条纹上面所积累的尘土或水垢非常严,,,查看详细安川莫托曼机器人示教器无法进入系统故障维修机器人示教器维修by安川机器人维修安川机器人示教器常见故障维修:安川莫托曼机器人示教器无法进入系统故障维修安川示教盒系统。
发那科FANUC机器人短路故障维修 机械臂维修
对机器人维修的具体流程:
1、清洗并润滑所有齿轮箱。
2、测试电机的制动。
3、检查是否有损坏的连接点。
4、测试所有电缆是否磨损和损坏。
5、清洁所有机柜热交换设备,包括风扇和过滤器。
6、根据需要检查并更换密封件。
7、重新润滑机械手上的平衡器和其他衬套/轴承。
8、测试和检查示教器,必要时更换覆盖层。
9、测试和检查示教器电缆。
10、重复性测试。
11、如果需要,调整齿轮齿隙,测试和检查任何皮带或皮带轮。
12、更换CPU电池和编码器电池。
触摸屏幕时鼠标箭头无任何动作,没有发生改变的故障现象和原因分析、解决方法……故障现象:发那科机器人示教器屏幕失灵,触摸屏幕时鼠标箭头无任何动作,没有发生改变。原因分析:原因:造成此现象产生的原因很多,下面逐个说明:表面声波触摸屏四周边上的声波反射条纹上面所积累的尘土或水垢非常严重。
还能代替人类完成度,危险,重复枯燥的工作,减轻人类劳动强度,可以说是一举两得,在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运,装卸,特别是在自动化数控机器人,组合机器人上使用更为普遍出处:电子科技伺服驱动器维修,伺服电机维修链接:Show5572.htm伺服驱。

示教器,I/O板,驱动器,伺服电机,计算机板,电源板,安全板等所出现的各种故障,川崎维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例飞克广东省东莞市松山湖园区中集智谷23栋12楼川崎维修案例Kawasak。
具体的故障情况可以分成下列几种:当手指所触摸的与鼠标箭头没有重合,导致此种机器人维修故障的原因是示教器安装完驱动程序后,在进行校正时,没有垂直触摸靶心正中,可以通过重新校正进行解决,,,,查看详细安川机器人驱动器启动故障维修机器人驱动器维修by安川机器人维修重新启动时。jvfufymukyu
 第2年
第2年

 第2年
第2年 







